
일반역학 [PYTHON] 파이썬 예제코드입니다 - vpython(6) 단진자의 운동 애니메이션, simple pendulum
2020.05.25 22:30
[PYTHON] 파이썬 예제코드입니다 -
vpython(6) 단진자의 운동 애니메이션, simple pendulum
제가 프로그래밍을 공부하기 위해 작성한 코드입니다
혹시 비슷한 분야를 공부하시는 분들은 허접한 코드지만 참고해서 봐주세요~
코드는 대부분 여러 고수님들의 코드를 참고해 작성했습니다 :-)
단진자의 운동 애니메이션 (줄의 길이가 2m이므로 속도가 조금 느리게 보입니다.)
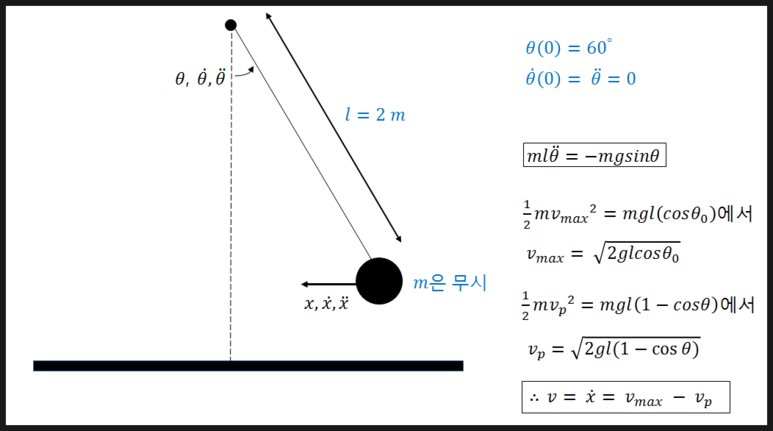
위의 조건을 바탕으로
단진자의 운동을 애니메이션화하는 코드를 작성하시오.
(단진자의 x방향 속도를 화살표로 나타내시오)


|
1
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 |
from visual import *
from math import * #------------------------------------------------------------------ # 그래픽 그려주는 코드 #------------------------------------------------------------------ # 그래픽창을 설정하는 코드 scene.range = (3.5,3.5,3.5) scene.center = (0,-1,0) scene.width = 400 scene.height = 700 # 단진자와 이를 받쳐주는 바닥과 봉, 단진자의 실을 생성합니다 ball = sphere(pos=(0,0,0), radius=0.15, color=color.blue, opacity=0.8) base = box(pos=(0,-2.5,-1), size=(2,0.1,2)) wall = box(pos=(0,-1,-1), size=(0.1,3,0.1)) bar = cylinder(pos=(0,0,-1), radius=0.05, axis=(0,0,1), color=color.yellow) line = curve(pos=[(bar.pos),(ball.pos)], color=color.gray(0.5)) # 속도를 가시화하기 위한 화살표객체를 생성합니다 velArrow = arrow(pos=ball.pos, axis=(0,0,0) , color=color.yellow) velFlag = 1 pi = 3.14159 # pi 값 r = 2. # 실의 길이 m theta0 = 60 # 초기각도 (deg) theta = (180 - theta0)*pi / 180 # 초기각도 (rad) g = 9.81 # 중력가속도 omega = 0 # 각속도 alpha = 0 # 각가속도 a = 0 # 가속도 v = 0 # 속도 v_max = sqrt(2*g*r*(-cos(theta))) # 초기각도에서의 속도의 최대값을 운동에너지 = 위치에너지로 구합니다 #------------------------------------------------------------------ # 애니메이션 코드 #------------------------------------------------------------------ t = 0 dt = 0.01 deg_theta = 0 # 텍스트를 위한 라벨 객체를 생성합니다 label1 = label() label2 = label() label3 = label() while True: rate(100) t += dt # 운동방정식으로 각가속도를 계산하고 이를 적분해 각속도,각도를 얻습니다 alpha = (g*sin(theta))/r omega += alpha*dt theta += omega*dt # 각도를 deg단위로 변환합니다 deg_theta = 180 - theta*180./pi # x축 방향의 속도를 계산합니다 # 실제속도 = 속도의 최대값 - 현재각도에서 속도값(위치에너지에 따른) # pi - theta인 이유는 0도가 y축의 양의 방향이고 이 방향이 수직 윗방향이기 때문에 pi를 빼준겁니다. (자세한건 직접해보세요~) v = v_max - sqrt(2*g*r*(1-cos(pi - theta))) # 줄의 위치와 공의 위치를 업데이트합니다 line.pos = [(bar.pos)+(0,0,1), (ball.pos)] ball.pos = (r*sin(theta), r*cos(theta), 0) # 속도화살표를 업데이트합니다. 각도에 따라 방향이 바뀌어야되므로 조건문을 추가합니다. 또한 속도값이 너무 크므로 0.3배로 화살표를 작게만들어줍니다 velArrow.pos = ball.pos if velFlag == 0: velArrow.axis = (v*0.3,0,0) else: velArrow.axis = (-v*0.3,0,0) # 속도화살표의 방향을 바꾸기 위한 조건문 if deg_theta >= theta0 - 0.01: velFlag = 1 elif deg_theta <= -theta0 + 0.01: velFlag = 0 # 텍스트 데이터 label1.pos = base.pos + vector(0,-0.5,0) label1.text = 'theta : %.2f deg' % (deg_theta) label2.pos = base.pos + vector(0,-0.1,0) label2.text = 'time : %.2f s' % (t) label3.pos = base.pos + vector(0,-0.9,0) label3.text = 'vel_x : %.2f m/s' % (v) Colored by Color Scripter |
본 웹사이트는 광고를 포함하고 있습니다.
광고 클릭에서 발생하는 수익금은 모두 웹사이트 서버의 유지 및 관리, 그리고 기술 콘텐츠 향상을 위해 쓰여집니다.
광고 클릭에서 발생하는 수익금은 모두 웹사이트 서버의 유지 및 관리, 그리고 기술 콘텐츠 향상을 위해 쓰여집니다.